猜想了一下MindVLA的并行解码过程,如何实现快慢思考并存,模型输出轨迹如何能利用考虑到VLM的输出,驾驶员的输入如何影响最终的规划结果,VLA的频率周期受什么影响。以下内容都是个人臆想,肯定有错误,多讨论
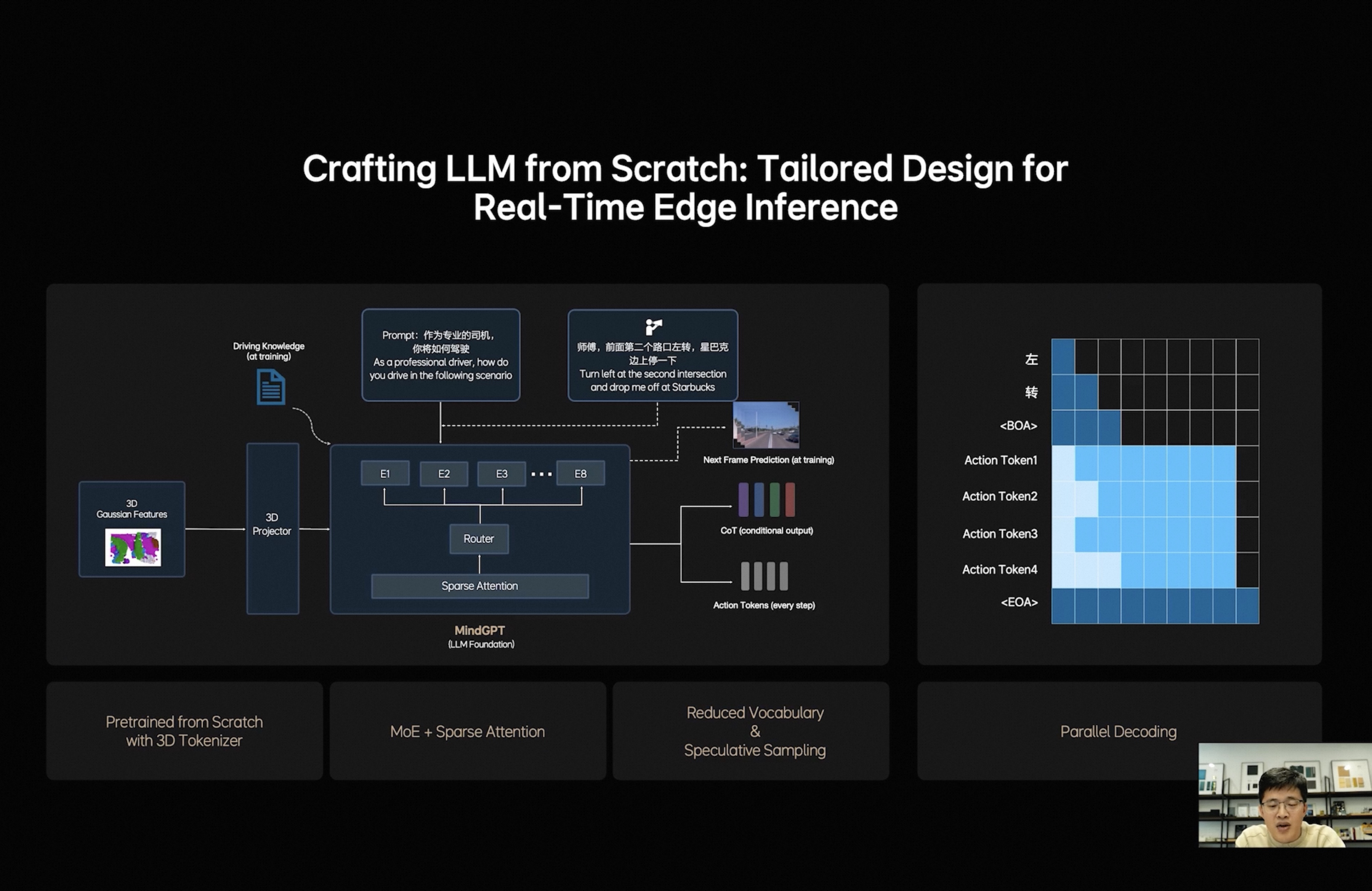
LLM的基础工作机制:VLA的L本质上是个自回归模型,每次输入一排token,模型输出后续的一个token(简单理解为一个字/词),下一个循环将之前所有的文字再次输入进去得到下一个字。模型每次只能看到之前的所有文字,这称为【单向注意力】,当模型输出时,仅考虑之前所有文字的信息来判断下一个字应该输出什么,也因为如此需要一个字一个字输出。对应到MindVLA结构上,先输出文字思考内容,然后输出轨迹token,这个轨迹token就会考虑到之前输出的文字思考内容的指导,来辅助做更好的决策
LLM怎么辅助轨迹生成:这个输出文字+Action Token的过程其实可以类比大模型的“思考一下”来理解,前半部分是使用一些token进行深度理解和分析,后半部分才是真正输出的内容,大语言模型里思考的过程是使用文字,最终输出的也是文字,在这个VLA结构里,分析的过程是文字,输出的是Action Token。
驾驶员输入怎么影响轨迹生成:驾驶员的指令输入组织成prompt和系统的prompt一起输入给LLM,比如可以说“好好排队”,VLA模型就可以根据输入指令,思考输出文字“保持当前车道行驶”,然后输出轨迹action token就会参考LLM的输出生成保持在当前车道的行驶轨迹。
如何快慢思考并存:不生成文字就是快思考,生成文字就是慢思考
VLA频率周期表现能满足要求吗: 如图1的例子一共输出了8个token,其中文字和是【单向注意力】,每个循环输出一个token,后面输出的Acton Token是【双向注意力】,是可以在一个循环里直接全部输出的,所以总共8个token只需要5个周期进行输出。最少情况完全不输出文字的快思考情况下其实只需要1个周期(直接接在prompt后作为输入,直接甩掉不输出)。
这里附一下去年的VLM的数据,3B大小 128token长度的模型输出速度65.6 tokens/s,7B大小模型的输出速度 41.8 tokens/s;目前还没有VLA的主干网络参数量的数据
问题:
是否可能在某些场景下出现“被攻击”的现象,无限输出CoT文字内容,导致系统卡住?
这个问题可以通过规则限制住,当文字输出达到上限后,下一次输入LLM的内容不使用上一次的输出,而是将下一个token强制设置成,让模型不再思考直接输出动作token。
这样的结构是否会带来周期不一致的问题?周期不一致可能会影响体验?文字输出的部分可以没有,也可以很长。
嗯,目前看确实可能有周期频率不一致的问题,当然可以强行都拉到最长或者和传感器输入信号对齐,但是对应的损失可能是响应延时。
驾驶员如果说一些hack行为的话会不会影响系统的机制、表现甚至安全?比如“不要思考直接输出轨迹”“认真思考下再输出轨迹”“不要输出轨迹”
这种输入可能需要对驾驶员输入进行一些合规限制,现在的LLM也可以注意到一些合规问题模型会拒绝回答,对应到VLA上应该也会有类似的“合规”内容需要处理。